























Взаимодействие роботов для манипуляций частиц под микроскопом
Манипулирование с помощью роботов биологическими образцами микронного масштаба, применяемыми в одноклеточной хирургии, измерениях клеток, энуклеации клеток и тканевой инженерии, является сложной задачей, требующей высокой ловкости и точности.
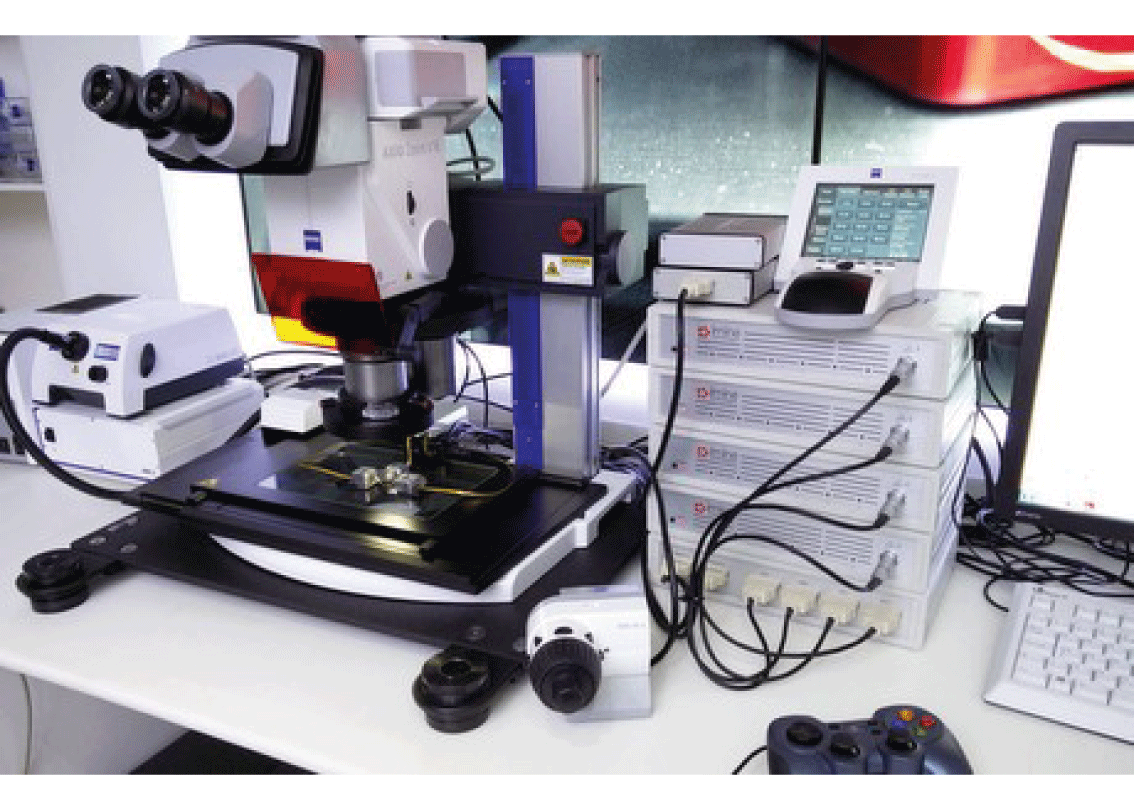
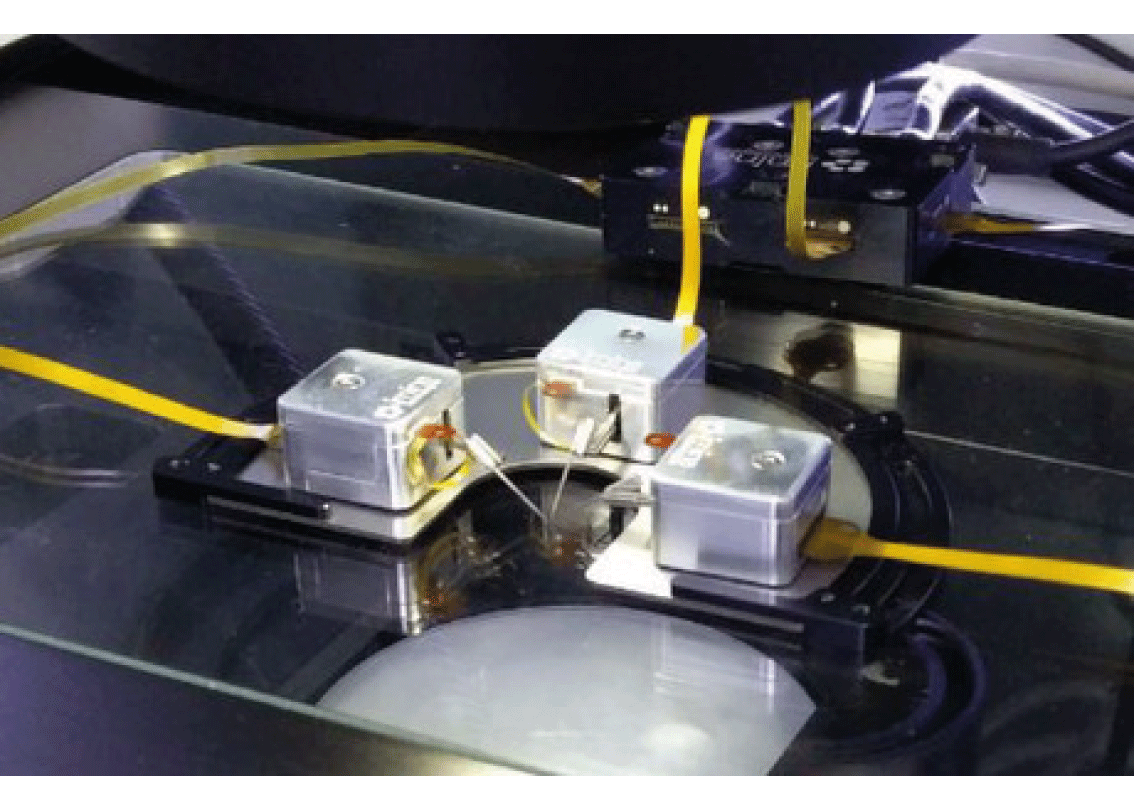
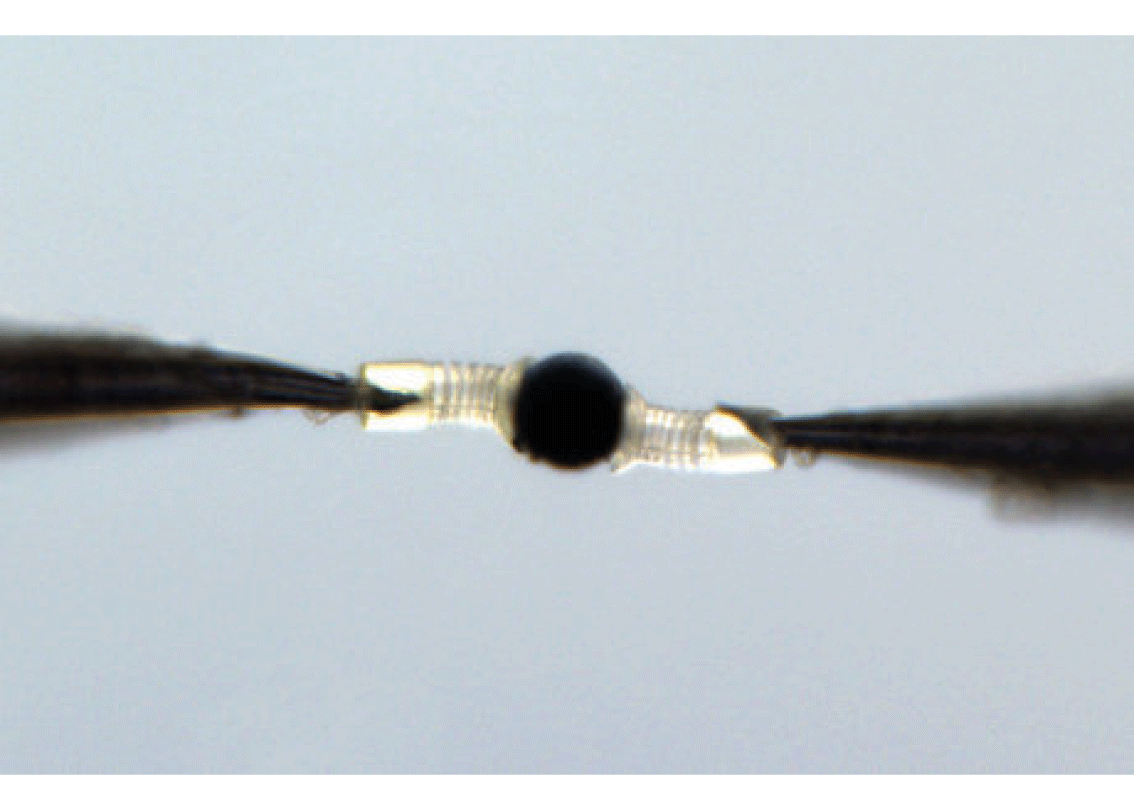
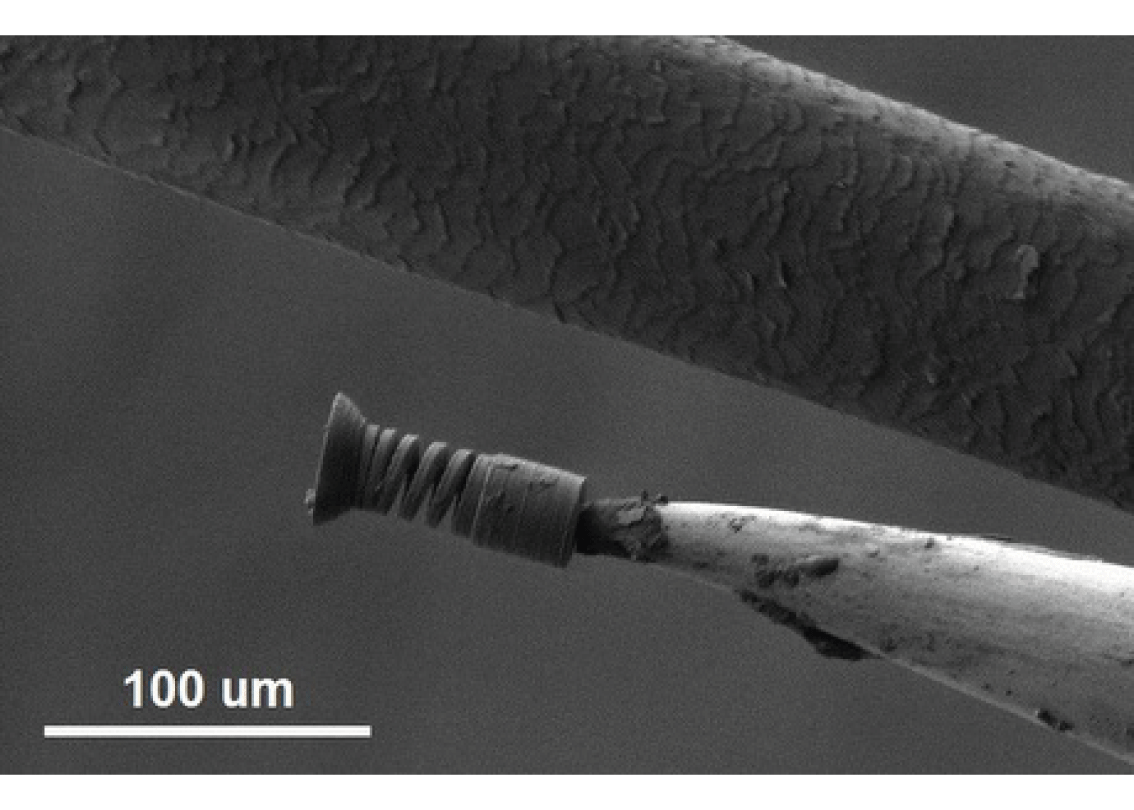
В данной статье освещается работа, которая направлена на решение этих проблем (место проведения: Hamlyn Center for Robotic Surgery of Imperial College London). Была разработана система мульти-роботов. Преимущества данной системы заключается в высокой плавности движений мобильных микророботов от Imina Technologies, а также их гибкости, позволяющей легко регулировать положение и ориентацию рабочего органа для образцов различных форм и размеров. Чтобы упростить обработку и транспортировку микрочастиц, были напечатаны гибкие рабочие органы на зондах манипулятора. Компьютерное программное обеспечение запрограммировано таким образом, чтобы помочь оператору с задачами взаимодействия полуавтоматических роботов.
Место проведения эксперимента:
Hamlyn Center for Robotic Surgery of Imperial College London, United Kingdom
Ссылка:
Maura Power and Guang-Zhong Yang, Direct Laser Written Passive Micromanipulator End-Effector for Compliant Object Manipulation, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). (DOI).
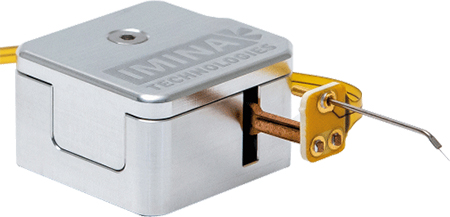
Высокоточные роботы для микроскопов miBot™
- Компактность: 20.5 х 20.5 х 13.6 мм, плечо: 8.3 мм (без рабочего органа)
- 4 степени свободы - X, Y, R, Z
- Масштабируемое разрешение позиционирования от мкм до нм
- Мобильность – интеграция пьезоэлектрических приводов в манипулятор
- Готовые решения для электрических или оптических микроскопов (NANO / MICRO)
- Широкий диапазон применения: электрическое зондирование, анализ дефектов, манипулирование